Robotics December 5, 2011
Posted on: December 9, 2011
Remember when I said that centering the servos was the best part; well I take that back. So far the centering has caused nothing but problems. This whole class was a big bowl of frustration, but thankfully we figured out what was wrong after a series of testing.
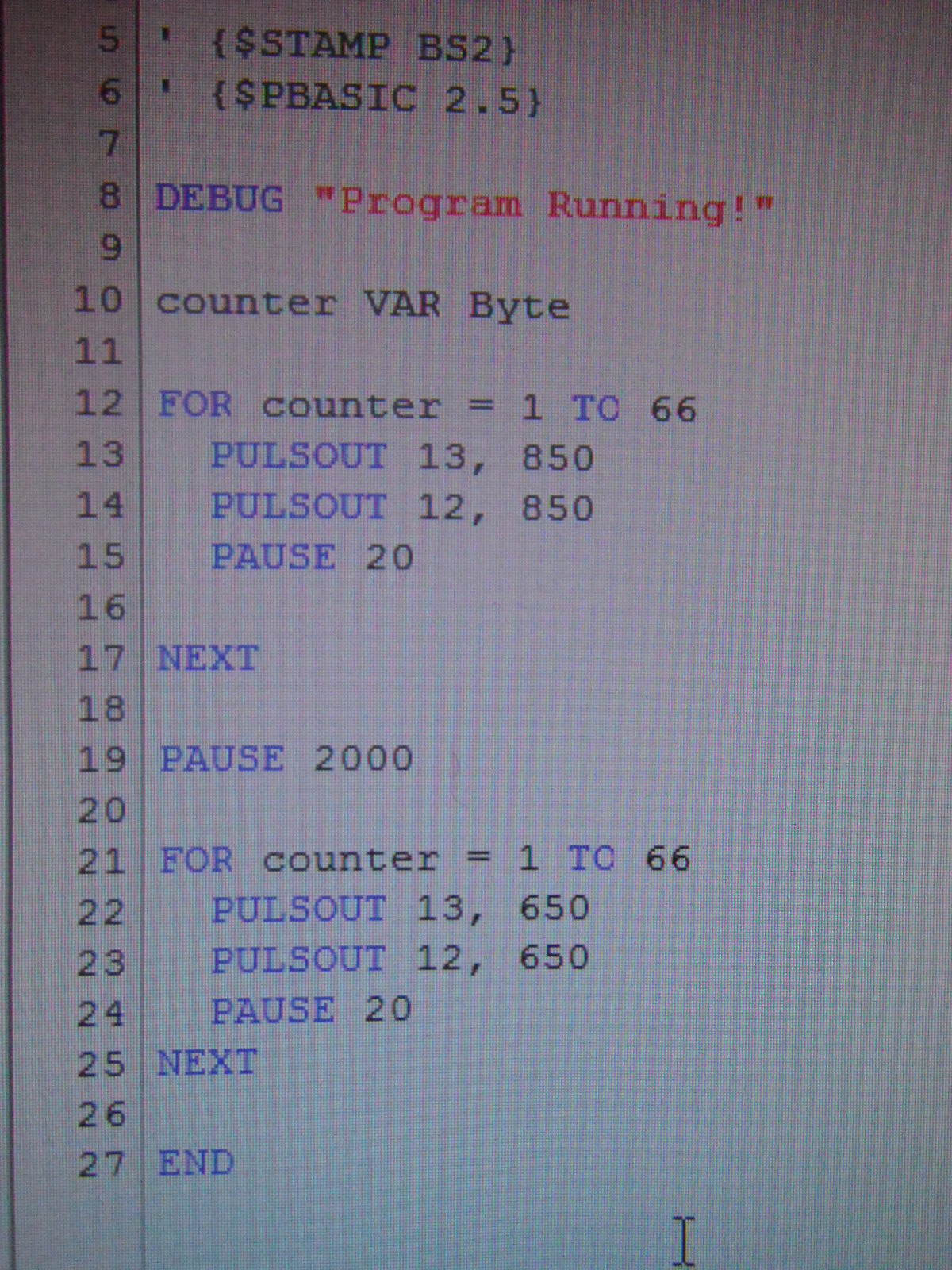
At the begging of class each of us got a program challenge, in which we had to program each of servos to go clockwise or counter clockwise. I was so prepared for this class that I, quickly wrote our program and ran it. Sadly class began with a bad start.

There was something wrong with our servo 12. For some odd reason it was only going clockwise in both cycles. I was almost very sure that all my durations were correct but servo 12 wasn’t running properly so there must be something wrong. I started playing around with the duration by changing them to every available number and when that didn’t, I called Mrs. Thomson for help. Turns out we were missing the two second pause in between the two cycles. Our program was perfected now, but perfecting the program didn’t solve our problem.
After a few rounds around the class, Mrs. Thomson came back to us and noticed that we still hadn’t fixed our problem. Another group had weak batteries so Mrs. Thomson suggested that maybe we were having problems with our batteries as well, so we quickly changed them. But servo 12 was still not going the right way.

Some time before class ended we finally figured out that servo 12 wasn’t going the right way because it wasn’t centered. I had noticed that the servo twitched when we last centered the servos but I didn’t think it was a big deal because it barely moved for a millisecond. Anyways, so I spent the remaining of the class trying to center the servo (it was very frustrating) and I told Nabila to listen for the next instruction because the rest of the class had already moved on.
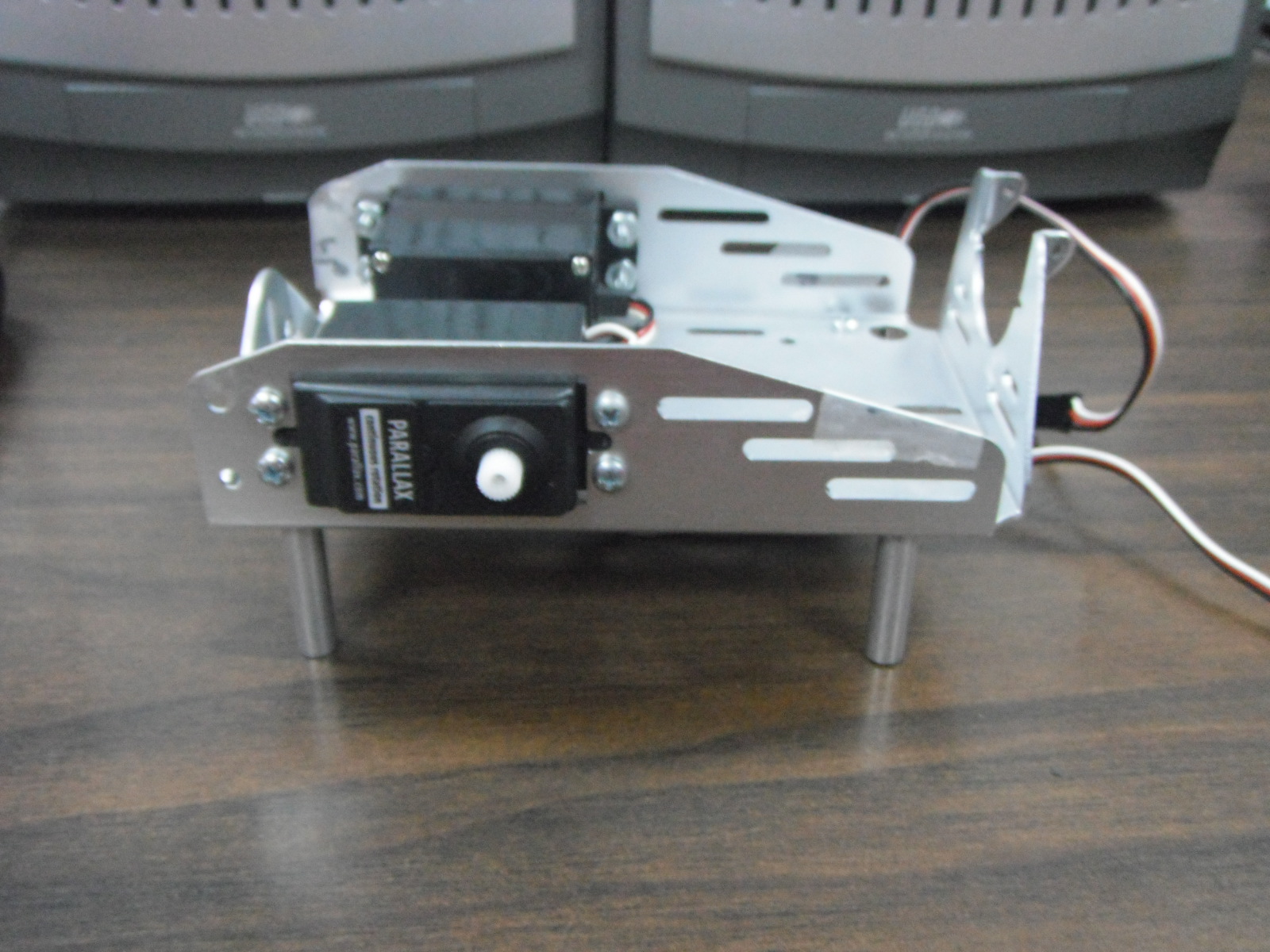
Finally I centered the servo, and then Nabila and I had to catch up with the rest of the class. We weren’t that behind (thankfully). Now class was getting really good because we were constructing our Boe Bots. The first thing we did was, fit our two servos into each of the large holes on the chassis. We were supposed to screw on the servos with the four head screw driver and we were supposed to use four screws for each servo. We got till the 3rd screw on the first servo and then the bell rang for the end of class. Man, I was so worried that I was behind the rest of the class. But to my surprise when I came back next class, most of the people were at the same step as me, thankfully.
What I learned from my experience this class is that I should not take anything lightly. Look what happened when I took the twitching servo so lightly. I guess I’ve realized everything counts when it comes to making a robot, down to the last screw. Things will just seem to be falling apart without it.

Leave a comment